ГИСТЕРЕЗИСНЫЕ МУФТЫ
Возможны два варианта исполнения гистерезисных муфт: в первом —
магнитное поле индуктора создается обмоткой, во втором — постоянными
магнитами. Недостатком первого варианта является наличие контактной
системы для передачи тока в индуктор, достоинством — возможность
электрического управления муфтой.
 Рис. 14.7. Магнитогистерезисная муфта с радиальным рабочим
зазором
Муфты с постоянными магнитами (магнитогистерезисные) обладают
высокой надежностью. Однако регулирование передаваемого момента в них
затруднено.
В магнитогистерезисной муфте (рис. 14.7) постоянные магниты 1 с
полюсными наконечниками 2 укреплены в магнитопроводе 3 индуктора,
связанного с ведущим валом. На ось ведомого вала насажен ротор,
состоящий из втулки f> из немагнитного или магнитомягкого материала и
колеи 4 активного слоя. Кольца активного слоя изготовлены из материала
с довольно широкой петлей гистерезиса, имеющей высокие значения
остаточной индукции и коэрцитивной силы. Шихтованная структура
активного слоя позволяет уменьшить вихревые токи и асинхронный
вращающий момент.
Пусть ротор заторможен, а индуктор вращается приводным двигателем с
угловой скоростью ац. Под действием вращающегося магнитного поля
индуктора в активном слое появляются потери на гистерезис от
перемагничивания. Потери за один цикл перемагничивания определяются
максимальным значением индукции в активном слое ротора.
При дальнейшем возрастании момента нагрузки (Мн> >МГ) муфта
переходит в асинхронный режим, когда частота вращения муфты меньше
частоты вращения индуктора.
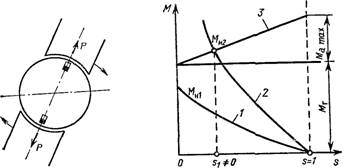
На рис. 14.9 изображены механические характеристики муфты,
представляющие собой зависимости момента нагрузки Мн и момента муфты Мг
от скольжения. Пока Мн^Мг, ведомый вал вращается с синхронной скоростью
(s = 0) (кривая 1). Если МН>МТ, то ведомый вал вращается со
скольжением (кривая 2). Однако момент, передаваемый муфтой, остается
постоянным, равным Мг.
При МН>МГ угол 6 = 6таж остается неизменным, т.е. ось полюсов,
наведенных в активном слое, продолжает вращаться синхронно с полем
индуктора, отставая при этом на постоянный угол Qmax- В то же время
ротор движется со скольжением s. Если активный слой выполнен в виде
литого цилиндра, то за счет вихревых токов кроме гистерезисного момента
Mv появляется асинхронный момент (прямая 3), пропорциональный
скольжению:
М = Ме + Mamaxs.
В этом режиме скольжение s^O, угловая скорость(o2<«>i, ротор
отстает от вращающегося индуктора и в нем создается дополнительный
момент, как в асинхронном двигателе.
Преимущество гистерезисной муфты заключается в постоянстве
передаваемого момента. Если нагрузочный момент Мя резко возрастает
(неполадки, поломки механизма), то максимальный момент, передаваемый на
приводной двигатель, ограничен Мг и гистерезисная муфта защищает
двигатель от перегрузки. Постоянство момента муфты обеспечивает быстрый
разгон нагрузки.
В ряде схем автоматики необходима быстрая остановка привода. В этих
случаях применяются тормоза на базе гистерезисной муфты. Ведомая часть
муфты делается неподвижной, а ведущая соединяется с приводным
двигателем. При торможении двигатель отключается и включается муфта.
Постоянный тормозной момент муфты обеспечивает быструю остановку
привода.
Гистерезисные муфты широко применяются для передачи момента в
агрессивную среду, отделенную от окружающей среды металлической
немагнитной оболочкой и находящуюся под высоким давлением. В этом
случае применяются муфты с аксиальным рабочим зазором. Ведущая часть с
индуктором отделена немагнитной стенкой от ведомой части с активным
слоем в виде колец.
Вопросы теории, конструкции и проектирования магнито-гистерезисных
муфт подробно рассмотрены в [14.3].
|